Code
Aula 03: Quatro Subespaços Fundamentais
Note
\(C(A) = \{Ax \mid x\in \mathbb R^2\}\)
Note
\[ A = \begin{bmatrix} 1 & 2 \\ 3 & 6\end{bmatrix}\] \[A^\top = \begin{bmatrix} 1 & 3 \\ 2 & 6\end{bmatrix}\]
\[C(A^\top) = \{A^\top v\mid v\in \mathbb R^2\}\]
\[ Ax = x_1\begin{bmatrix}1\\3\end{bmatrix} + x_2\begin{bmatrix}2\\6\end{bmatrix} = 0\] \[ Ax = 2\begin{bmatrix}1\\3\end{bmatrix} + (-1)\begin{bmatrix}2\\6\end{bmatrix} = 0\] \[x = \begin{bmatrix}2 & -1\end{bmatrix}^\top \in N(A)\]
\(N(A^\top)\) contém todas as soluções para a equação \[A^\top y = 0\]
Também chamado de Left Nullspace
\[ Ax = y_1\begin{bmatrix}1\\2\end{bmatrix} + y_2\begin{bmatrix}3\\6\end{bmatrix} = 0\] \[ Ax = 3\begin{bmatrix}1\\2\end{bmatrix} + (-1)\begin{bmatrix}3\\6\end{bmatrix} = 0\] \[x = \begin{bmatrix}3 & -1\end{bmatrix}^\top \in N(A)\]
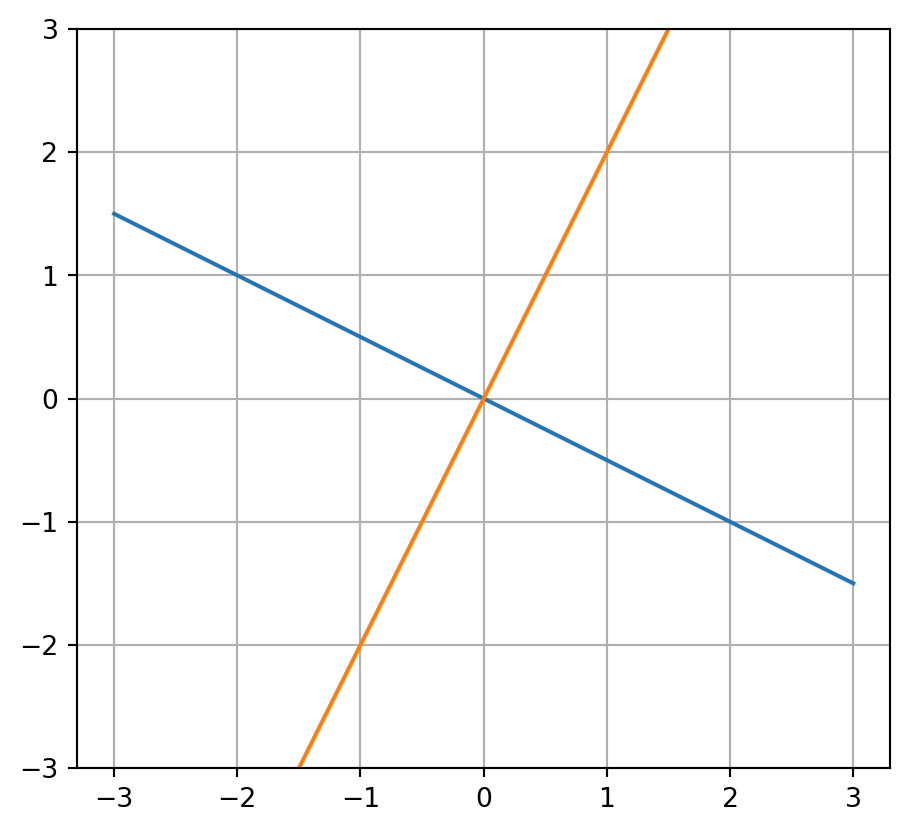
\[A = \begin{bmatrix}1 & 2 \\ 3 & 6\end{bmatrix}\] - \(A\) é um mapa \(f\colon \mathbb R^2 \rightarrow \mathbb R^2\) - Posto de \(A\) é 1 \[ C(A) = \begin{bmatrix}1 & 3\end{bmatrix}^\top \] \[ C(A^\top) = \begin{bmatrix}1 & 2\end{bmatrix}^\top \] \[ N(A) = \begin{bmatrix}2 & -1\end{bmatrix}^\top \] \[ N(A^\top) = \begin{bmatrix}3 & -1\end{bmatrix}^\top \]
import matplotlib.pyplot as plt
import numpy as np
import matplotlib.ticker as plticker
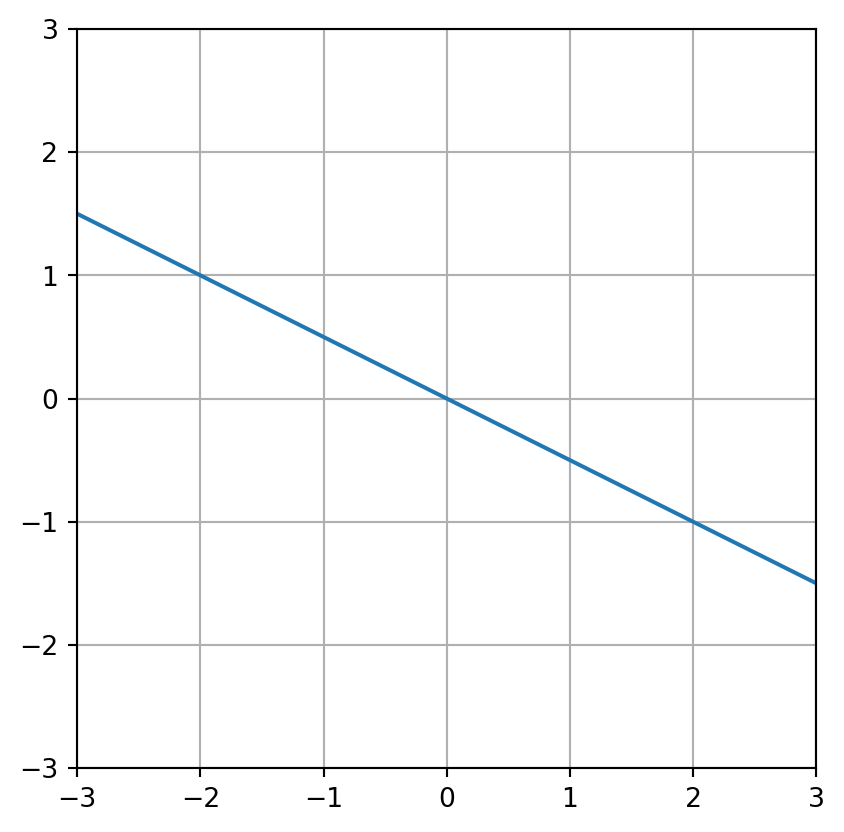
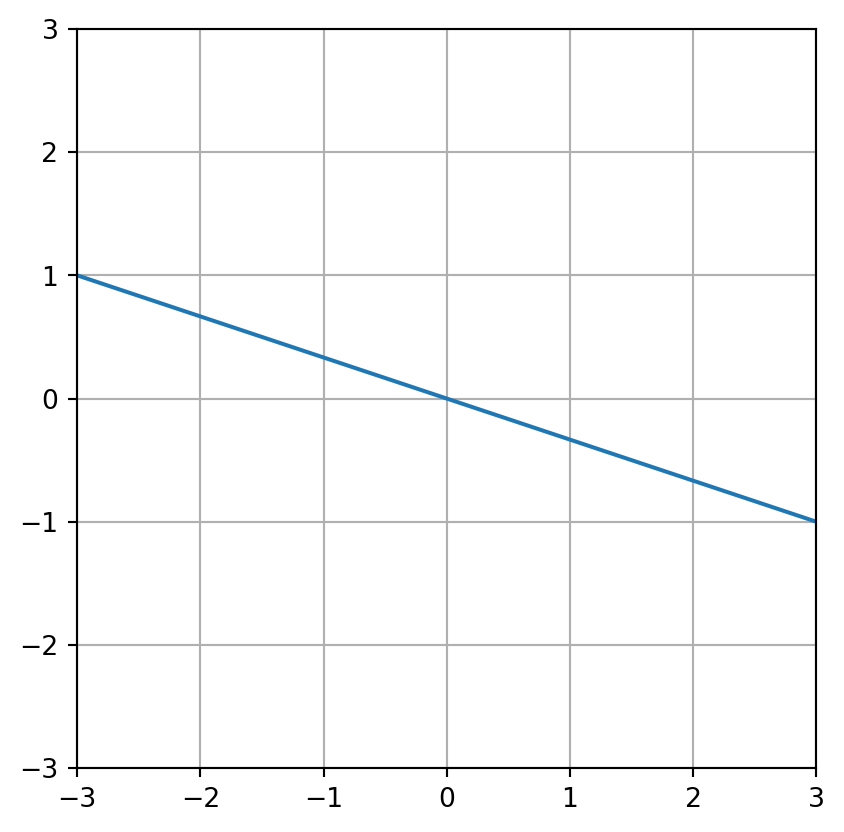
x = np.array(range(-3,4))
y = -x/3
plt.plot(x,y)
# y = -2*x
# plt.plot(x,y)
# y = x/2
# plt.plot(x,y)
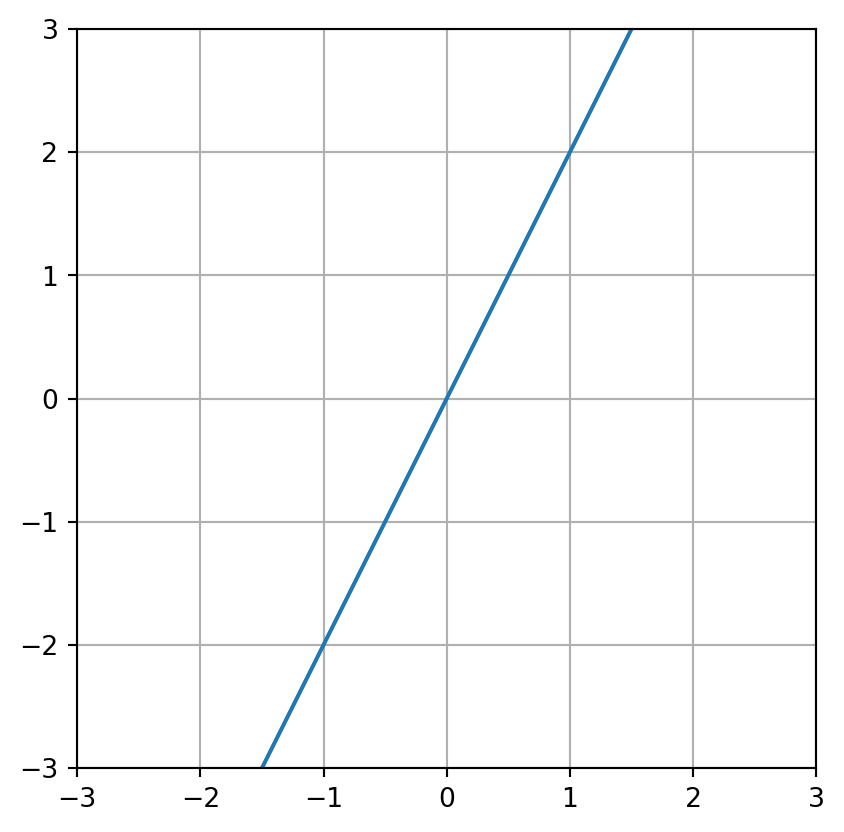
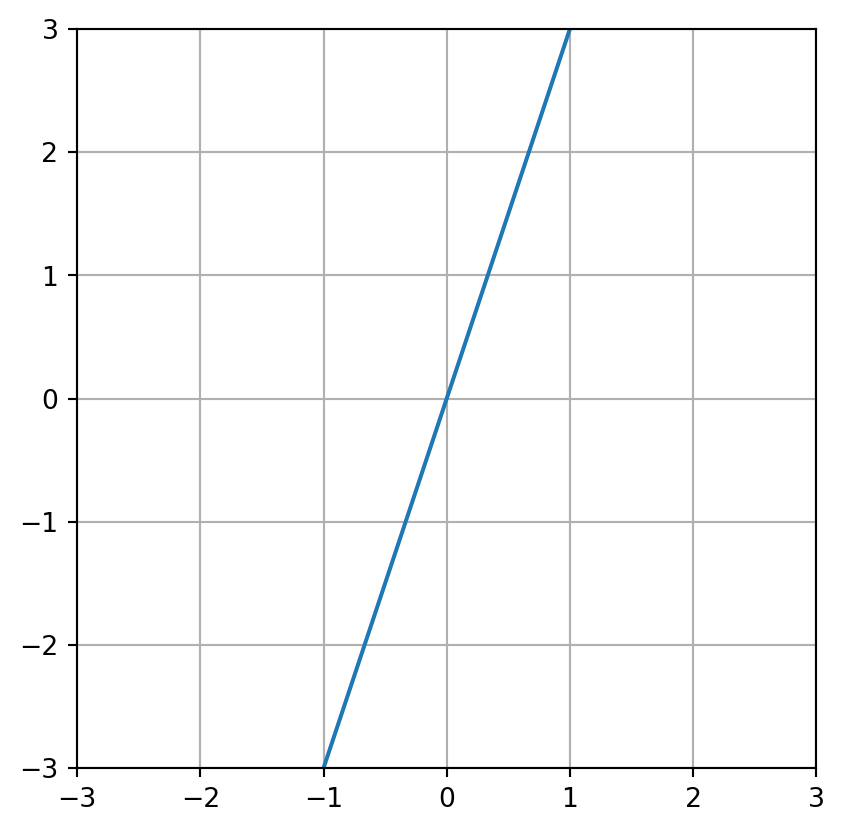
x = np.array(range(-1,2))
y = x*3
plt.plot(x,y)
plt.grid(True)
plt.yticks(np.arange(-3, 4, 1.0))
axes=plt.gca()
axes.set_aspect(1)
plt.show()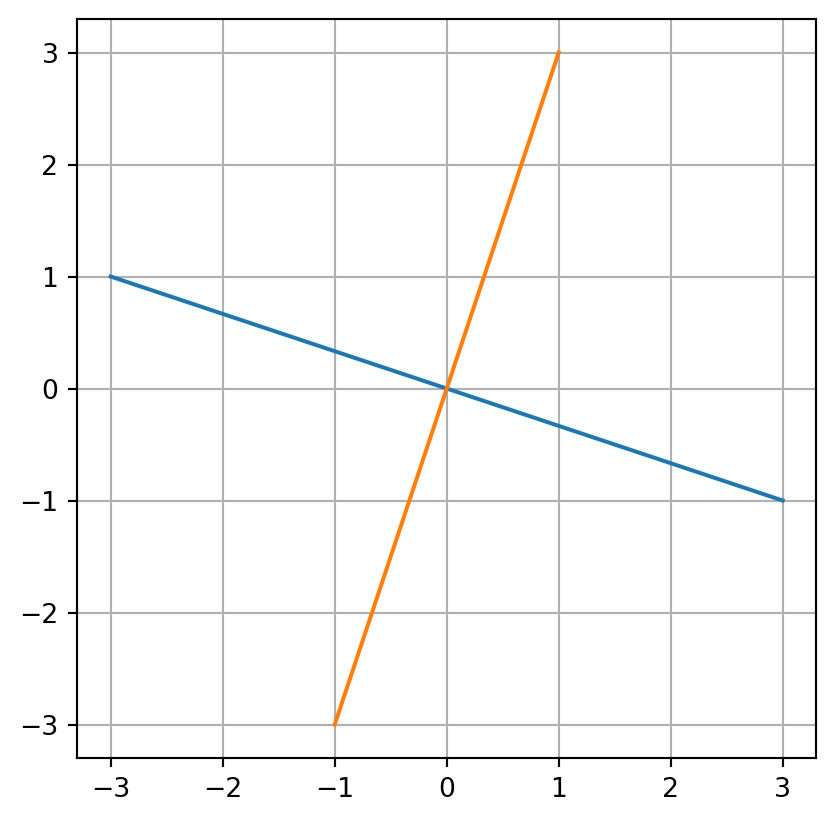
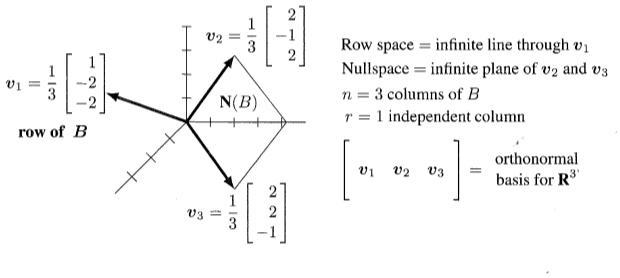
\[ B = \begin{bmatrix} 1 & -2 & -2 \\ 3 & -6 & -6\end{bmatrix}\]
\[ B = \begin{bmatrix} 1 & -2 & -2 \\ 3 & -6 & -6\end{bmatrix}\begin{bmatrix}a\\b\\c\end{bmatrix} = \begin{bmatrix}0\\0\end{bmatrix}\]
A equação acima admite as seguintes soluções \[x_1 = \begin{bmatrix}2\\1\\0\end{bmatrix} \, x_2 = \begin{bmatrix}2\\0\\1\end{bmatrix}\]
Essas não são as melhores soluções pois não são perpendiculares
Aprenderemos como encontrar soluções perpendiculares através de Gram-Schmidt