Álgebra Linear Computacional
Aula 18: Sistemas Lineares
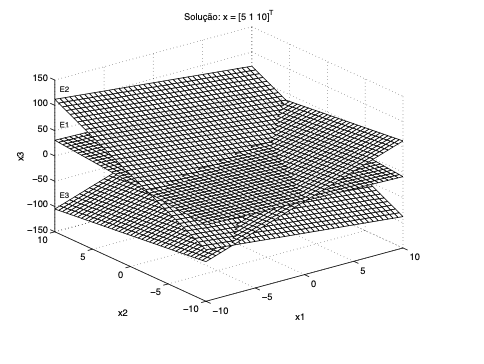
Geometria de sistema com solução única
- Solução de um sistema linear de ordem \(n\) é um ponto no \(\mathbb C^n\) comum aos \(n\) hiperplanos descritos por cada uma das \(n\) equações
\[ \begin{bmatrix} 1 & -3 & 2 \\ -2 & 8 & -1 \\ -20 & 5 & 3 \end{bmatrix} \begin{bmatrix} x_1\\x_2\\x_3 \end{bmatrix} = \begin{bmatrix} 22 \\ -12 \\ -65 \end{bmatrix} \]
- Vetor solução \(x\) é a interseção dos três planos descritos por cada uma das três equações E1, E2 e E3: \(x = \begin{bmatrix}5 & 1 & 10\end{bmatrix}^\top\)
![Geometria]()
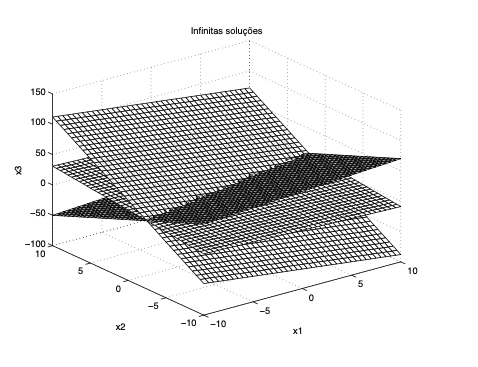
Geometria de sistema com infinitas soluções
Por exemplo, \[ \begin{bmatrix} 1 & -3 & 2 \\ -2 & 8 & -1 \\ -1 & 5 & 1 \end{bmatrix} \begin{bmatrix} x_1 \\ x_2 \\ x_3 \end{bmatrix} = \begin{bmatrix} 22 \\ -12 \\ 10 \end{bmatrix} \]
Com \(\text{det}(A) = 0\), os três planos se interceptam em uma linha reta descrita por \(x = \begin{bmatrix}70-6,5\theta & 16-1,5\theta &\theta \end{bmatrix}^\top\)
Para cada valor de \(\theta\) ter-se-á uma solução do sistema linear
![]()
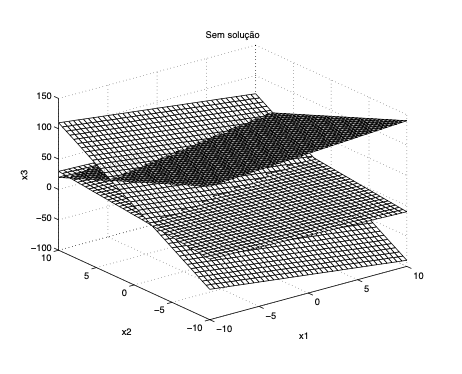
Geometria de sistema sem solução
Por exemplo, \[ \begin{bmatrix} 1 & -3 & 2 \\ -2 & 8 & -1 \\ -1 & 5 & 1 \end{bmatrix} \begin{bmatrix} x_1 \\ x_2 \\ x_3 \end{bmatrix} = \begin{bmatrix} 20 \\ -10 \\ 80 \end{bmatrix} \]
Com \(\text{det}(A) = 0\) os planos não têm ponto em comum
![]()
Exemplo de pivotação parcial
Resolver o sistema pelo método de Gauss com pivotação parcial \[ \begin{bmatrix} 1 & -3 & 2\\ -2 & 8 & -1\\ 4 & -6 & 5 \end{bmatrix} \begin{bmatrix} x_1 \\ x_2 \\ x_3 \end{bmatrix} = \begin{bmatrix} 11\\ -15 \\ 29 \end{bmatrix} \] - Escolha do pivô: (elemento \(a_{31}\))
Escolha do Multiplicador \(m_{11} = \frac{a_{11}}{a_{31}} = 0,25\)
Escolha do Multiplicador \(m_{21} = \frac{a_{21}}{a_{31}} = -0,5\)
Eliminar os elementos da primeira coluna \[ \begin{bmatrix} 0 & -1,5 & 0,75\\ 0 & 5 & 1,5\\ 4 & -6 & 5 \end{bmatrix} \begin{bmatrix} x_1 \\ x_2 \\ x_3 \end{bmatrix} = \begin{bmatrix} 3,75\\ -0,5 \\ 29 \end{bmatrix} \]
Para eliminar o elemento da segunda coluna, escolhe-se o maior elemento em módulo desta coluna, sem considerar o elemento da linha pivotal \(L3\). Sendo assim, o pivô será o elemento \(a_{22}\)
Escolha do multiplicador \(m_{12} = \frac{a_{12}}{a_{22}} = -0,3\)
Eliminar os elementos da segunda coluna \[ \begin{bmatrix} 0 & 0 & 1,2\\ 0 & 5 & 1,5\\ 4 & -6 & 5 \end{bmatrix} \begin{bmatrix} x_1 \\ x_2 \\ x_3 \end{bmatrix} = \begin{bmatrix} 3,6\\ -0,5 \\ 29 \end{bmatrix} \]
Para que a matriz fique triangular superior, podemos trocar as linhas \(L3\) e \(L1\) \[ \begin{bmatrix} 4 & -6 & 5\\ 0 & 5 & 1,5\\ 0 & 0 & 1,2 \end{bmatrix} \begin{bmatrix} x_1 \\ x_2 \\ x_3 \end{bmatrix} = \begin{bmatrix} 29\\ -0,5 \\ 3,6 \end{bmatrix} \]
Por que o determinante ficou diferente? (simétrico)
- Trocar po sição de duas linhas: \(\text{det}(A) = -\text{det}(A')\)
- Multiplicar todos os elementos de uma linha por uma constante \(k\): \(\text{det}(A) = k\text{det}(A')\)
- Somar o múltiplo escalar de uma linha à outra linha: \(\text{det}(A) = \text{det}(A')\)
