Álgebra Linear Computacional
Aula 21: Análise de Convergência
Exemplo 1
Seja o sistema \(Ax = b\) e sua solução exata \(x^*\)
\[ \begin{bmatrix} 10 & 3 & -2 \\ 2 & 8 & -1 \\ 1 & 1 & 5 \end{bmatrix} \begin{bmatrix} x_1\\x_2\\x_3 \end{bmatrix} = \begin{bmatrix} 57\\20\\-4 \end{bmatrix} \] e \[ x^* = \begin{bmatrix} 5 \\ 1 \\ -2 \end{bmatrix} \]
- Usando Gauss-Seidel obtemos a seguinte equação de recorrência \(x^{k+1} = Sx^k + d\)
\[ S= \begin{bmatrix} 0 & -0,300 & 0,200 \\ 0 & 0,075 & 0,075 \\ 0 & 0,045 & -0,055 \end{bmatrix} \] e \[ d = \begin{bmatrix} 5,700 \\ 1,075 \\ -2,155 \end{bmatrix} \text{ e } x^0 = \begin{bmatrix} 5,7 \\ 2,5 \\ -0,8 \end{bmatrix} \]
- Assim, temos que o vetor erro inicial é \(\epsilon^0 = x^0 - x^* = \begin{bmatrix}0,7 & 1,5 & 1,2\end{bmatrix}^\top\)
- Calculando os autovalores \(\Lambda\) da matriz de iteração \(S\) e seus respectivos autovalores \(V\) temos
\[\Lambda = \begin{bmatrix} 0 & 0 & 0 \\ 0 & 0,09718 & 0 \\ 0 & 0 & -0,07718 \end{bmatrix} \]
\[ V = \begin{bmatrix} 1 & -0,92174 & -0,97074 \\ 0 & 0,37189 & -0,10615 \\ 0 & 0,10997 & 0,21538 \end{bmatrix} \]
Sendo assim, o erro na \(k\)-ésima iteração é \[ \begin{bmatrix} \epsilon^k_1 \\\epsilon^k_2\\ \epsilon^k_3 \end{bmatrix} = \begin{bmatrix} 1 & -0,92174 & -0,97074 \\ 0 & 0,37189 & -0,10615 \\ 0 & 0,10997 & 0,21538 \end{bmatrix} \begin{bmatrix} 8,19997(0)^k \\ 4,90841(0,09718)^k \\ 3,06538(−0,07718) ^k \end{bmatrix} \]
Sendo o vetor \(c\) a solução do sistema linear \(Vc = \epsilon^0\)
Calcula-se o vetor erro \(\epsilon^k\) a cada iteração
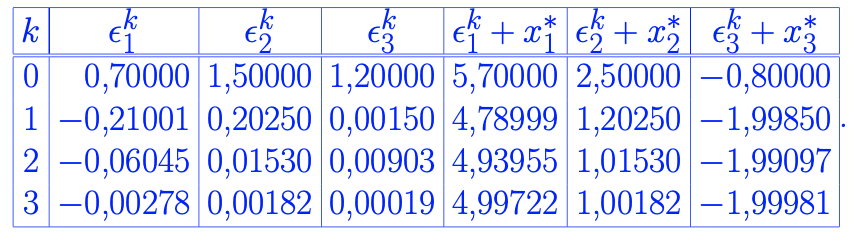
- O processo converge pois \(\vert \lambda_i\vert < 1 \forall i\)
\[ \lim_{k\rightarrow \infty} \lambda_i^k = 0 \Rightarrow \lim_{k\rightarrow \infty} \epsilon^k = 0 \]
- Solução divergiria se pelo menos um \(\vert \lambda_i\vert>1\)
\[ \lim_{k\rightarrow \infty} \lambda_i^k = \infty \Rightarrow \lim_{k\rightarrow \infty} \epsilon^k = \infty \]
Velocidade de Convergência
- Vetor erro \(e^k = V\Lambda^k c\)
- Quanto menor o valor de \(\rho(M)\), masi rápido convergirá o método iterativo
- Matrizes iteração para um determinado sistema: \[ J = -D^{-1}(E + F) = \begin{bmatrix} 0 & -0,3 & 0,2 \\ -0,25 & 0 & 0,125 \\ -0,2 & -0,2 & 0 \end{bmatrix} \]
\[ S = -(D + E)^{-1}F= \begin{bmatrix} 0 & -0,3& 0,2 \\ 0 & 0,075 & 0,075 \\ 0 & 0,045 & -0,055 \end{bmatrix} \] - Raios espectrais: \((\rho(S)=0,0972 ) < (\rho(J)=0,2725)\) - Método de Gauss-Seidel converge mais rápido - Gasta 6 iterações contra 9 iterações do método de Jacobi
